Index
ASAP-MID – Aufbringung von leitfähigen Strukturen auf additiv gefertigte Silikonbauteile
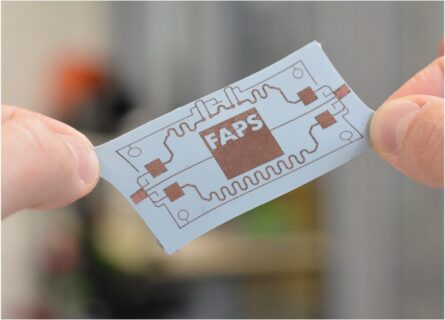
Hochflexible und gleichzeitig leitfähige Strukturen sind ein Enabler für eine Reihe an Technologien in den Bereichen dielektrischer Elastomer-Aktoren, EMG-Sensoren und Sensorik für SoftRobots. Sie haben das Potenzial die entscheidende Schnittstelle zwischen rigider Elektronik und flexibler Sensorik darzustellen.
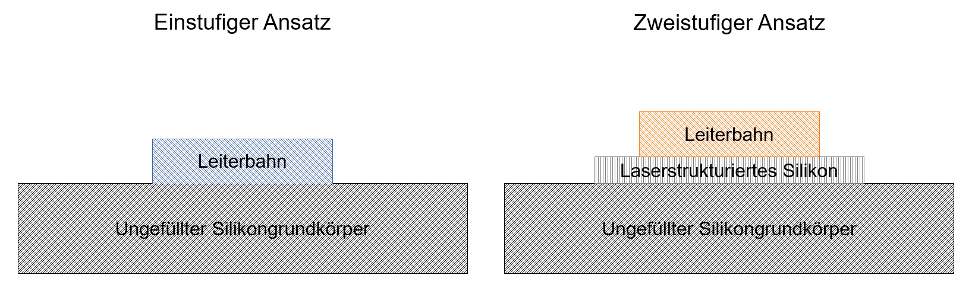
Innerhalb des Projekts werden zwei Ansätze zur Aufbringung der leitfähigen Strukturen verfolgt. Einerseits werden Silikonkautschuke direkt mit leitfähigen Füllstoffen versetzt, andererseits wird additiviertes Silikon laserstrukturiert und anschließend metallisiert.

Innerhalb des Projekts werden folgende Ziele verfolgt:
- Ermittlung notwendiger Bauteileigenschaften der leitfähigen Silikonbauteile für die industrielle Verwertung
- Aufbau einer Anlage zur additiven Fertigung mit dynamisch gefüllten Kautschuken
- Charakterisierung der gefüllten Kautschuksysteme und der daraus gefertigten Bauteile
- Ableitung von Fertigungsparametern und erzielbaren Materialeigenschaften für den industriellen Einsatz
- Transfer der Projektergebnisse in die industrielle Verwertung
Wir freuen uns auf die Zusammenarbeit mit unseren Forschungspartnern innerhalb des umfangreichen projektbegleitenden Ausschusses.
EndoKI – KI-gestützte multimodale Diagnostik und stratifizierte Therapie für Endometriose
Das Projekt EndoKI verfolgt das Ziel, mithilfe künstlicher Intelligenz die Diagnostik und Therapie von Endometriose entscheidend zu verbessern. Ein interdisziplinäres Forscherinnenteam entwickelt dafür ein dreidimensionales Patientinnenmodell, das Bildgebung, Operationsdaten und Nachsorgeinformationen integriert. Im Fokus stehen eine frühere und standardisierte Diagnose sowie eine patientenschonendere Behandlung.
Die medizinische Notwendigkeit ist groß: Im Durchschnitt vergehen derzeit rund acht Jahre, bis eine Endometriose erkannt wird – eine Zeit, in der viele Betroffene unter erheblichen chronischen Schmerzen leiden. KI-gestützte Bildgebung soll künftig eine präzisere präoperative Planung ermöglichen und dadurch die Zahl invasiver Eingriffe verringern.
Ein zentrales Element des Projekts ist der Aufbau einer pseudonymisierten Datenbank, die MRT-Aufnahmen und histopathologische Befunde umfasst. Diese Daten bilden die Grundlage für KI-Trainingsmodelle und eröffnen zugleich neue Perspektiven für die weitere Forschung. Ergänzend wird eine ethnografische Teilstudie durchgeführt, die die Bedarfe und Sichtweisen von Patient:innen und Ärzt:innen systematisch erhebt.
Der Lehrstuhl FAPS entwickelt in diesem Rahmen ein standardisiertes Untersuchungsprotokoll für die Ultraschall-Elastografie. Ziel ist eine verbesserte Detektion von Endometrioseherden, unter anderem durch optimierte Sonden- und Patientinnenpositionierung sowie den Einsatz physischer Gewebemodelle. Die erhobenen Ultraschall- und Elastografie-Daten werden manuell annotiert und dienen anschließend dem Training KI-gestützter Modelle zur automatischen Registrierung, Segmentierung und Erkennung typischer Läsionsmuster. Darüber hinaus sollen KI-Methoden helfen, Inter-Observer-Variabilitäten zu verringern und so den diagnostischen Prozess zu standardisieren.
EMGRoll – Intuitive Steuerung von Rollstühlen mittels hochaufgelöster Muskelsignale
Mobilitätseinschränkungen haben weitreichende Folgen für den Alltag der Betroffenen und führen neben der körperlichen Einschränkung häufig auch zu psychischen Problemen. Der Rollstuhl stellt für die Betroffenen die einzige Möglichkeit dar, am täglichen Leben teilzunehmen. Aufgrund von Funktionseinschränkungen der oberen Extremitäten, beispielsweise durch eine Querschnittlähmung, können jedoch nicht alle Menschen mit Behinderung einen klassischen Rollstuhl bedienen. Auch die Bedienung eines elektrisch angetriebenen Rollstuhls ist davon betroffen. Neben körperlichen Einschränkungen können auch unzureichende motorische oder kognitive Fähigkeiten ein Hindernis für die selbstständige Nutzung eines Rollstuhls darstellen und damit die Teilhabe am täglichen Leben einschränken.
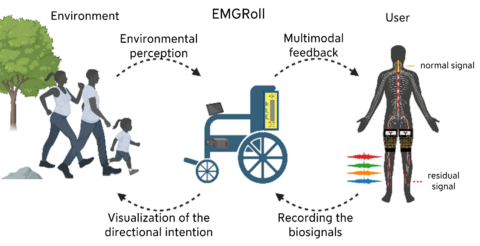
Ziel von EMGRoll ist die Erforschung eines Sensorkits, das durch die Kombination von EMG-Signalen und Sensoren zur Umgebungserfassung eine intuitive und assistierte Steuerung von elektrisch angetriebenen Rollstühlen ermöglicht. Basierend auf der Erkenntnis, dass bei den meisten querschnittgelähmten Patienten noch eine neuronale Verbindung zwischen Gehirn und Muskeln besteht, hat das n-squared lab unter Leitung von Prof. Dr. Alessandro Del Vecchio ein Brain-Machine-Interface entwickelt. Dieses soll in EMGRoll auf die unteren Extremitäten erweitert werden, um die Bewegungsintention der Beine zu messen und an die Steuerung des Rollstuhls weiterzugeben. Um die Bewegungsintention intelligent an die Umgebung anzupassen, soll die vom Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik (FAPS) unter Leitung von Prof. Dr. Jörg Franke entwickelte autonome Navigation für Rollstühle genutzt werden, um eine geteilte Steuerung des Rollstuhls zwischen Nutzer und intelligenter Maschine zu erforschen.
PreciEye – Präzisierung der berührungslosen Augeninnendruckmessung zur Selbstdiagnostik
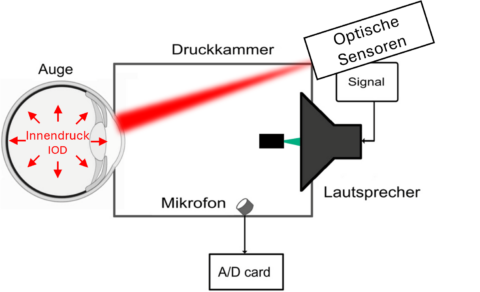
Glaukome sind weltweit eine der häufigsten Ursachen für Erblindungen und betreffen insbesondere ältere Menschen. In Deutschland erkranken etwa 2-4 % der über 65-Jährigen an dieser Krankheit, was jährlich zu 1.000 Neuerblindungen führt.
Das Glaukom entsteht durch eine Degeneration der neuronalen Ganglienzellen im Sehnerv, häufig infolge eines erhöhten Augeninnendrucks (IOD). Dieser erhöhte Druck ist ein wesentlicher Risikofaktor, und seine Senkung bleibt die einzige Behandlungsoption. Die frühzeitige Erkennung und Behandlung dieser Degeneration ist essentiell, da der bisherige Verlust der Sehfähigkeit nicht rückgängig gemacht werden kann. Für eine optimale Diagnose und Therapieplanung ist die Erfassung einer Tagesdruckkurve notwendig, da diese über den Tagesverlauf stark schwankt.
Um eine augenschonende und selbstständige Messung zu ermöglichen, wurde am BIMAQ ein Konzept erarbeitet, bei dem der IOD kontaktlos aus der Schwingungscharakteristik des Auges bestimmt wird. Da die Messung indirekt erfolgt und von der Handhabung des Geräts abhängig ist, sollen die Ergebnisse im Projekt PreciEye über zusätzliche Sensorik und durch maschinelles Lernen abgesichert werden.
GraspAgain – Wiederherstellung der Handfunktion bei neuromuskulären Einschränkungen durch eine intelligente Neuroorthese
Weltweit leiden 50 Millionen Menschen unter neuromotorischen Beeinträchtigungen der Hand aufgrund einer Rückenmarksverletzung oder eines Schlaganfalls. Infolgedessen sind diese Menschen in den Aktivitäten des täglichen Lebens enorm eingeschränkt. Es wurde bereits gezeigt, dass Neuroorthesen die Hände gesunder Menschen bewegen können. Allerdings gibt es noch Forschungs- und Entwicklungsbedarf, um einzelne Finger einer gelähmten Hand zu bewegen. Das Projekt GraspAgain zielt mit einer intelligenten Neuroorthese darauf ab, die Handfunktion von Menschen mit neuromuskulären Einschränkungen wiederherzustellen. Das Projekt umfasst zwei Forschungsschwerpunkte: ein nichtinvasives Brain-Machine-Interface und eine Mechatronik. Ein interdisziplinäres Projektteam mit hoher Fachexpertise kann bereits auf gemeinsame Vorarbeiten zurückgreifen. Wir sind der Überzeugung, mit GraspAgain ein revolutionäres Produkt erschaffen zu können, das Menschen mit Handbeeinträchtigungen wieder ein unabhängigeres Leben ermöglichen soll.
ToCaro: Miteinander erleben – Emotionen teilen

Das BMBF-Forschungsprojekt “ToCaro” im Rahmen der Bekanntmachung „Nähe über Distanz – Mit interaktiven Technologien zwischenmenschliche Verbundenheit ermöglichen“ hat zum Ziel, die multisensorische Verbindung zwischen Menschen zu erforschen. Dazu soll ein Interaktionsgegensand akustisches, visuelles und haptisches Feedback vereinen und somit eine möglichst harmonische Interaktion ermöglichen. Der FAPS übernimmt in dem Vorhaben die Aufgaben der haptischen Realisierung des Forschungsdemonstrators und stellt Versuchsaufbauten für unterschiedliche Interaktionsszenarien zur Verfügung.
Ziel des Projekts ist die Entwicklung eines interaktiven, physischen Objekts ToCaro, das multisensorische Verbindungen zwischen räumlich getrennten Personen initiiert und so Nähe über Distanz schafft. Das vorrangige Ziel ist es, soziale Isolation – sei es in Zeiten der Pandemie, aufgrund räumlicher Distanz oder gesundheitlicher Faktoren – zu überbrücken und eine sozial, sensorisch und emotional reichhaltigere Begegnung zu ermöglichen, als es mit aktuellen Technologien wie Videotelefonie möglich ist. Die Arbeitsziele betreffen andererseits psychophysische Untersuchungen an Prototypen der technischen Umsetzung, in denen die Wahrnehmbarkeit – z.B. Wahrnehmungsschwelle bei der Anregung der dielektrischen Elastomeraktoren – oder die Qualität von sensierbaren Signalen – z.B. die Textverständlichkeit der akustischen Ausgabe durch eine textile Oberfläche hindurch – untersucht werden. Weitere Arbeitsziele umfassen die Gestaltung des ToCaro, sowohl die Form als auch die Funktion betreffend, in einem strengen partizipativen Design und die Evaluierung in ausgedehnten Tests mit Probanden, in denen insbesondere die psychologischen Designziele wie Verbundenheit, Akzeptanz, aber auch eine mögliche Gruseligkeit sowie die Nutzungsintention und das reale Nutzungsverhalten (in längsschnittlicher Realtest-Untersuchung) untersucht werden.
LOMOBI – Lernfähiges Assistenzsystem für Orientierung und Mobilität von sehbeeinträchtigten Personen im Alltag

Sehbeeinträchtigungen sind häufig mit Barrieren in der alltäglichen Mobilität der Betroffenen verbunden und führen nicht selten zu sozialer Isolation. Zwar können klassische Mobilitätshilfen bei der Mobilität unterstützen, jedoch können diese meistens nur in bekannten Umgebungen nach intensivem Training eingesetzt werden. In unbekanntem Umfeld ist häufig die Unterstützung einer geschulten und sehenden Person nötig.
Um dieser Herausforderung zu begegnen und die Selbstbestimmtheit sehbeeinträchtigter Personen zu verbessern, soll ein interaktives Assistenzsystem für Betroffene entwickelt werden. Durch verschiedene Sensoren und Datenverarbeitung soll eine sicherere Navigation im Alltag ermöglicht werden. Die gewonnen Umgebungs- und Navigationsinformationen werden den Nutzenden dabei situations- und bedarfsgerechten über multimodale Schnittstellen kommuniziert. Je nach Umgebung werden spezialisierte und effiziente Algorithmen genutzt, um Teilaufgaben wie Lokalisation, Umgebungsinterpretation und Pfadplanung zu ermöglichen.
Die Forschungsschwerpunkte liegen dabei auf der Gestaltung einer interaktive Kommunikationsschnittstellen zwischen Nutzenden, dem System und der Umwelt. Die Teilaufgaben der Navigation, wie Lokalisation, Umgebungsinterpretation und Pfadplanung werden spezifisch für unterschiedliche Szenarien (z. B. öffentliche Gebäude, urbane Umgebungen) konzipiert und je nach aktueller Umgebung genutzt. Der für die sichere Navigation essentielle und rechenintensive Aspekt der Umgebungsinterpretation wird mittels spezialisierter und dadurch möglichst effizienter Methoden des Maschinellen Lernens (Künstliche Neuronale Netze) umgesetzt. Das System wird so einerseits lernfähig konzeptioniert, um an unterschiedliche Gegebenheiten angepasst werden zu können und andererseits adaptiv gestaltet, um an die Präferenzen des Nutzenden angepasst zu werden und eine intuitive Nutzung zu ermöglichen.

ProLAM – Modellbasierte Optimierung des Liquid Additive Manufacturing (LAM) Prozesses
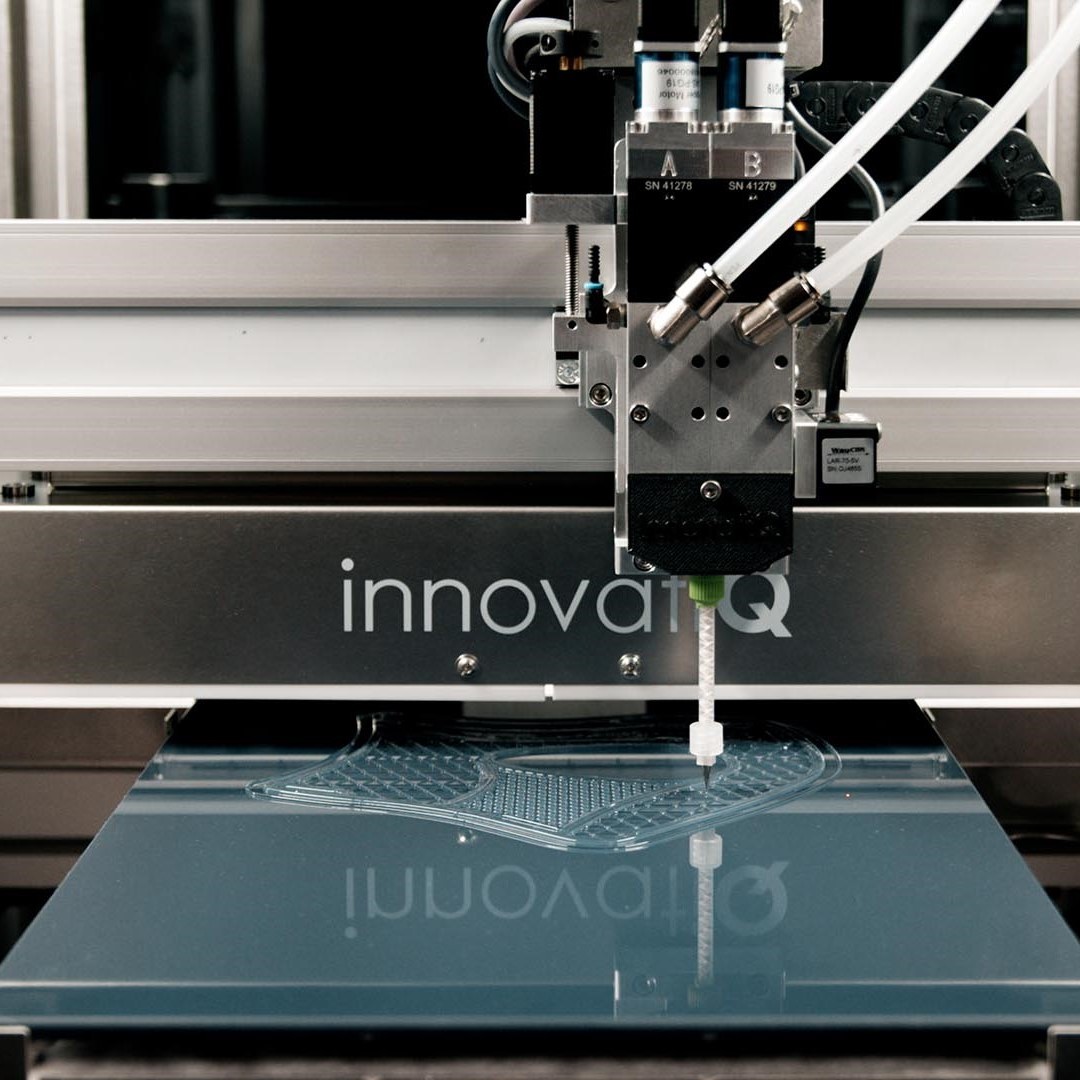
Silikonbauteile werden sowohl in der Industrie, als auch in der Medizintechnik weitreichend eingesetzt. Die herausragenden Materialeigenschaften, wie hohe Rissdehnung, Temperaturbeständigkeit oder chemische Beständigkeit, sind maßgeblich dafür verantwortlich. Gerade im Bereich der Medizintechnik sind zudem patientenspezifische Lösungen gefragt, sodass in Kombination auch komplexe additive Fertigungssysteme für Silikonbauteile benötigt werden. Diese Prozesse sind jung und schwer zu beherrschen, da ein irreversibel chemisch reaktives Gemisch verarbeitet wird. Vorteile gegenüber indirekten Additiven Verfahren, dem Guss in gedruckte Formen, bestehen jedoch sowohl in Komplexitäts- als auch Kostenvorteilen.
Das Forschungsprojekt befasst sich mit dem Liquid Additive Manufacturing (LAM) Prozess, durch welchen komplexe Silikonbauteile direkt additiv gefertigt werden können. Innerhalb des Prozesses werden zwei Ausgangskomponenten zu einem unvernetzten Silikonkautschuk vermischt. Anschließend wird der Kautschuk bahnförmig auf einer Bauplattform aufgetragen und vernetzt dort additiv. Die Geschwindigkeit der Vernetzung wird durch die eingebrachte thermische Energie beeinflusst.
Der komplexe Prozess soll innerhalb des Forschungsprojekts analysiert und modelliert werden. Anschließend kann die Einstellung von Prozessparametern automatisiert und auf das Bauteil abgestimmt erfolgen, was die manuelle Vorbereitungszeit verkürzt und Fehldrucke verhindert.


Patientengerechte Interaktion mit einem artifiziellen intraurethralen Sphinkter

Die willkürlich und bedarfsgerecht durch den Patienten ausführbare Ansteuerung aktiver Implantate ermöglicht die Entwicklung neuer Therapiesysteme, ist jedoch kaum erforscht und in marktverfügbaren implantierbaren Systemen noch nicht umgesetzt. Am Lehrstuhl FAPS der FAU wird ein neuartiges, minimalinvasiv implantierbares Schließmuskelsystem für die Harninkontinenztherapie erforscht, bei welchem es sich um weltweit eines der ersten aktiven Implantate handelt, dessen Funktion direkt und willkürlich durch den Patienten angesteuert wird. Die patientengerechte Kommunikation im Falle eines auftretenden Miktionsbedarfs stellt eine neuartige Herausforderung dar, für welche im Rahmen des vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Projektes PARTIS Interaktionsstrategien zur patientengerechten Bedienung und Integration des Systems in den Alltag der Betroffenen erforscht werden sollen.
Im Gegensatz zu Therapiesystemen aus dem Stand der Technik, welche sich in der Regel nur für Männer eignen, kann das neuartige Schließmuskel-Implantat auch für die Therapie der großen Gruppe weiblicher Betroffener angewandt sowie bedarfsgerecht mit ihm interagiert werden. Mithilfe der Förderung soll die Grundlage für ein marktfähiges Medizinprodukt geschaffen werden, welches intuitiv und bedarfsgerecht ansteuerbar ist.
Weitere Informationen sind auf der Webseite des BMBF zu finden.
Mobiles, haptisches Scanverfahren für die optimierte Erfassung von Gewebeeigenschaften in der Orthopädietechnik
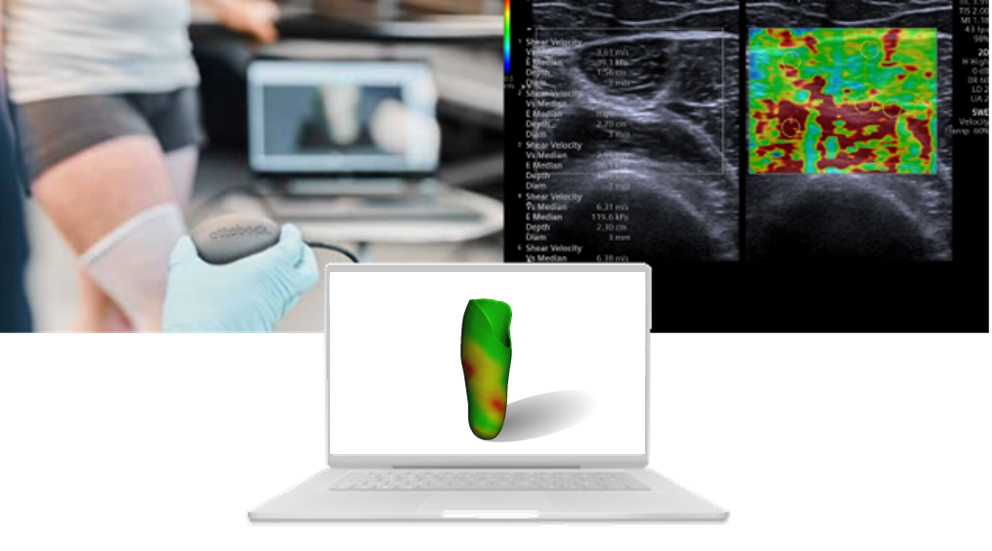
Die prothetische Versorgung ist aktuell ein manuelles Verfahren, welches auf dem Können und Wissen des Orthopädietechnikers basiert. Auf Basis der händisch erfassten Gewebestruktur wird ein Gipsabdruck physisch modelliert, um die Basis für die Schaftgeometrie zu erstellen. Durch die subjektive Erfassung des Gewebezustands können wiederholte Anpassungen des Schafts, der entscheidenden Schnittstelle zwischen Körper und Prothese nötig sein oder Fehlversorgungen auftreten. Neben einem inkonsistenten Versorgungsstandard ist die Dokumentation der Therapie durch fehlende quantifizierbare Daten erschwert und verhindert den kontinuierlichen Datenaustausch in diesem interdisziplinären Feld zwischen Chirurgen, Orthopädietechnikern und Therapeuten.
Im Projekt „HapticScan“ wird deshalb die quantifizierbare Erfassung der Gewebedaten mit Daten eines Oberflächenscans fusioniert, umso eine ganzheitliche Informationsgrundlage für die Versorgung zu schaffen und auch kleinen Betrieben die prothetische Versorgung beispielsweise über Auftragsfertigung auf Basis dieser Datengrundlage zu ermöglichen.
Mittels des im Projekt entwickelten neuen haptischen Scansystems soll die bisher händisch durchgeführte Palpation (Untersuchung durch Abtasten) durch den Orthopädietechniker quantifiziert und digital erfasst werden. Hierfür werden die Sensordaten eines ultraschallbasierten Messverfahrens mit exakten Lokalisierungsdaten fusioniert, um eine Integration in am Markt befindliche Oberflächenscansysteme zu ermöglichen.