Index
Hybride Robotikzelle zur Sortierung unstrukturierter Materialströme
Die Robotikzelle kombiniert zwei unterschiedliche Robotersysteme entlang eines Förderbands, um unstrukturierte Materialströme effizient und adaptiv zu greifen und zu sortieren.
- Förderband (ca. 8 m Länge)
- Zwei Roboter greifen vom Band
- Yaskawa HC-10 6-Achs-Knickarmroboter
- Seilgetriebener, bioinspirierter Roboter
- Verarbeitung unstrukturierter Materialströme
Universal Robots UR30 – Modelljahr 2025

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR30 |
| Arbeitsradius | 1300 mm |
| Nutzlast | 30 kg |
| Grundfläche | Ø 245 mm |
| Eigengewicht | 63,5 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,1 mm |
| Kommunikation | 500 Hz Steuerfrequenz
Modbus TCP PROFINET PROFIsafe Ethernet/IP USB 2.0, USB 3.0 ROS/ROS2 kompatibel |
Autonomer Routenzugschlepper Linde P50C ION

Im Rahmen des Forschungsprojekts POV.OS wird der Routenzugschlepper Linde P50C ION am Lehrstuhl FAPS für den autonomen Betrieb modifiziert und als Demonstrator eingesetzt.
Das Grundmodell Linde P50C ION ist in der Intralogistik weit verbreitet und wird für den Materialtransport auf Anhängern mit einer maximalen Anhängelast von 5.000 kg bei Geschwindigkeiten von bis zu 8 km/h verwendet.
Für die Umrüstung wird der Schlepper mit der modularen Automatisierungsplattform POV.OS basierend auf ROS 2 ausgestattet. Die eingesetzte Hardware umfasst:
- Rechnerplattformen / Automation Control Units
- Stereokameras
- Laserscanner
- Ultraschallsensoren
- Radar
Auf Basis dieser Plattform werden am Lehrstuhl FAPS nicht nur die autonome Navigation und Ansteuerung des Fahrzeugs, sondern auch innovative KI-Algorithmen zur multimodalen Umgebungserfassung erforscht.
Flugfeld zur Erprobung und Validierung von autonomen Flugrobotersystemen

Das Indoor-Flugfeld des Lehrstuhl FAPS mit einer Fläche von 7 x 11 Metern und einer Höhe von 4 Metern ist für die Erprobung und Validierung von Hard- und Softwarelösungen sowie Gesamtsystemen aus dem Bereich der Flugroboter und Drohnen bestens ausgestattet.
Neben verschiedenen Flugrobotern werden auch verschiedene Sensor-, Lokalisierungs- und Rechnersystem für Drohnen am Flugfeld eingesetzt:
- Verschiedene Flugroboter: Quadro- und Hexakopter, Software basierend auf PX4 Autopilot und ROS2
- Sensoren zur Umgebungserfassung für Flugroboter: Kameras, z.B. Intel Realsense sowie Stereolabs ZED2i, ZED X, verschiedene Ultraschall- und Lidarsensoren
- Onboard-Rechner für Flugroboter, u. a. NVIDIA Jetson, Latte Panda Alpha
- UWB-Funkortungssystem (ca. 10 cm Lokalisierungsgenauigkeit)
- Motion-Capturing-System (Lokalisierungsgenauigkeit im Bereich von ca. 0,5 cm)
- Workstations zum Training und Einsatz von KI und zur Simulation von Flugrobotern
- Hochregal zur Erprobung von Inventurszenarien
Universal Robots UR3e – Modelljahr 2023

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR3e |
| Arbeitsradius | 500 mm |
| Nutzlast | 3 kg |
| Grundfläche | Ø 128 mm |
| Eigengewicht | 11,2 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,03 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |
Kollaborativer Roboter Franka Emika Panda

| Spezifikationen | |
| Hersteller | Franka Emika |
| Robotertyp | Panda Research Robot, 7-Achsen |
| Reichweite | 855 mm |
| Traglast | 3 kg |
| Software | Franka Desk, ROS, easypanda |
Laborroboter Yaskawa MOTOMAN SIA 10F
| Spezifikationen | |
| Hersteller | Yaskawa |
| Robotertyp | MOTOMAN SIA10 F, 7-Achsen |
| Reichweite | 720 mm |
| Traglast | 10 kg |
| Steuerung | FS100 |
| Greifer | Zimmer GEH6040IL |
| Software | inform, ROS, OPCUA |
Das System ist in einer Roboterzelle zur Handhabung von mediznischen Drehverschluss-Röhrchen zur Vor- und Nachbereitung der PCR-Analyse integiert. Ein Projektvideo des Projektpartners infoteam Software AG kann unter folgendem Link gefunden werden: https://youtu.be/kNDaC_4BhIQ
Humanoider Roboter Pepper
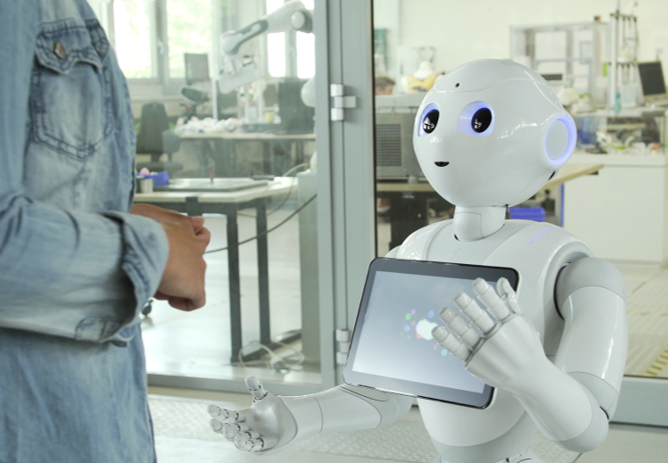
| Spezifikationen | |
| Hersteller | Aldebaran Robotics |
| Robotertyp | Humanoider Roboter Pepper |
| Höhe | 121 cm |
| Gewicht | 28 kg |
| Sensoren | 2 Kameras, 3D Sensoren, 4 Mikrofone, 2 Lautsprecher, 1 Tablet, 6 Lasersensoren, 2 Infrarotsensoren, 2 Ultraschallsensoren, 5 taktile Sensoren |
| Steuerung | Intel Atom mit Embedded Linux, NAOqi |
| Software | Choregraphe, ROS |
Universal Robots UR5e – Modelljahr 2021
| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR5e |
| Arbeitsradius | 850 mm |
| Nutzlast | 5 kg |
| Grundfläche | Ø 149 mm |
| Eigengewicht | 20,6 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,03 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |
Universal Robots UR16e – Modelljahr 2021

| Spezifikationen | |
| Hersteller | Universal Robots |
| Typenbezeichnung | UR16e |
| Arbeitsradius | 900 mm |
| Nutzlast | 16 kg |
| Grundfläche | Ø 190 mm |
| Eigengewicht | 33,0 kg |
| Freiheitsgrade | 6 rotierende Gelenke |
| Wiederholgenauigkeit gemäß ISO 9283 | ± 0,05 mm |
| Kommunikation | 500 Hz Steuerfrequenz Modbus TCP PROFINET Ethernet/IP USB 2.0, USB 3.0 |